人形机器人的新起点
文章来源: 发布日期:2024-08-28 浏览次数:612024年世界机器人大会在北京正式开幕,与以往大的不同在于,今年是人形机器人参展企业多的一届 ,共有27家人形机器人整机企业、30多家产业链上下游企业亮相。
随着AI突飞猛进,具身智能成为了今年资本市场上热的领域之一,那些曾经仅存在于科幻电影中的机器人,正离现实生活越来越近,变得“看得见、摸得着”。
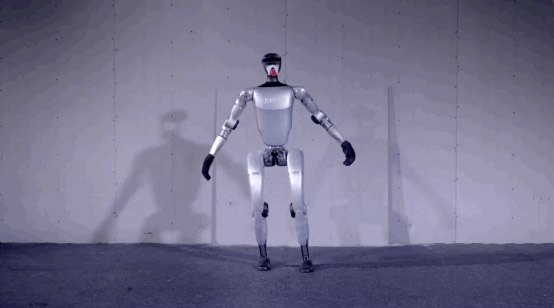
在开幕前后,也有多家机器人公司发布了新产品,比如经纬创投投资的宇树科技发布了G1量产版本,起售价为9.9万元,这款产品在世界机器人大会上展出,更强性能、外观,关键的是可以大批量生产了。
宇树G1机器人身手敏捷,不仅可以空中劈腿,还可以自由地上下楼梯,轻巧敏捷
英伟达科学家Erwin Coumans迫不及待想搞一台来做实验
智元机器人则是一口气发布了五款商用人形机器人产品,包括3款适用于不同场景的远征系列(A2、A2-W、A2-Max),2款模块化机器人系列产品(灵犀X1和X1-W,后者面向专业数据采集)。
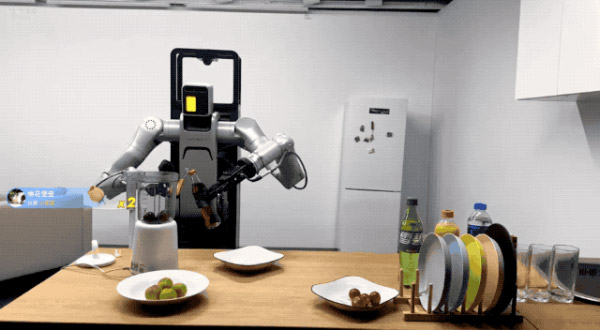
星尘智能则发布了新一代AI机器人助理Astribot S1,这款产品也在2024世界机器人大会上正式亮相。
星尘智能的机器人助理Astribot S1,正在烘烤华夫饼
今天随着人形机器人越来越走进现实,也迎来了群雄逐鹿的时刻,但技术路线仍不确定、应用场景皆有可能。 经纬创投在几年前就系统性地关注通用智能机器人赛道,在机器人软硬件一体化领域,投资了宇树科技、智元机器人、银河通用、星尘智能 ,它们都是的全技术栈型创业公司,但各自的技术切入方向并不相同,切入的应用场景也不尽相同,有工业、仓储物流、零售、生物制药等等场景。短期目标都是快速占领各自的应用场景,谁先把一个细分场景做好,积累出足够多的数据,就有可能继续拓展新的延展领域,终走向通用化。
除了机器人软硬件一体化外,在产业链上游的两个重要方向(数据、一体化关节) ,经纬创投也投资了AI仿真数据领域的光轮智能 ,正在为行业提供海量的高真实性、高效用性的训练数据;而在一体化关节/执行器领域,经纬则投资了钛虎机器人 ,钛虎有非常高效和全面的产品系列,覆盖了从灵巧手到全身上下的所有关节……
相比于AI大模型,人形机器人更需要工程层面的实践与突破。 比如1990 年出生的王兴兴,并不是履历亮眼的学霸型创业者,他是一个典型的理科偏才。“大家可能觉得很多院校的人很厉害,但实际上大家都是普通人,在机器人这个行业里,很多人只做软件,完全没碰过硬件,而硬件是实践出来的,你知道就是知道,不知道就是不知道。” 宇树科技创始人兼CEO王兴兴说,在大学时代他就发现,只要集合好的零部件,并且用上先进的软件,就可以做出一个更好产品,组合式创新。
与王兴兴有着类似的经历,钛虎创始人易港是一位95后,早在大学宿舍就搞起了3D打印机和焊台,大一就做出了假肢原型机,还在中美创客大赛中获奖;大二又做出了一套主从式外骨骼,手部拥有17个自由度。他总结自己为什么能在大学时期的很多奖项中,打败名校的参赛项目,核心的就是自己的产品“看得到、摸得着、能体验,对社会有直接价值,而不是漂亮的PPT。”
随着AI大模型的突破,今天的人形机器人,正越来越逼近临界点。 有越来越多之前不敢想的任务,如今都可以实现了。特别是随着“世界模型”的提出,机器人的真机数据越来越具备实用价值。
“下一个十年,值得做的就是人形机器人。” 星尘智能创始人来杰说,他曾是腾讯RoboticsX机器人实验室的一号员工、百度“小度机器人”团队负责人,在去年底离职创业。
“人工智能的黎明已经迅速临近,我预计在明年年底之前,全球至少会有一家公司能够推出相对通用的机器人AI模型 ,发展速度之快令人瞩目。” 王兴兴说,“我在年初提出了这一观点,至今仍然坚信,明年年底实现这一目标是非常有可能的。”
一、“软与硬”的结合
不同技术路线、不同应用场景,逐鹿方始
今天的机器人与以往大的区别在于,随着AI的爆发,智能泛化能力大幅加强,这让通用机器人成为可能。 传统机器人并不需要对外界自主响应,所以这是一个自动化设备,不断地重复之前预设的程序。而现在有了智能泛化能力的突破,甚至只需要语音控制,机器人就能实现新功能,这是从自动化到智能化的底层转变。
而AI大模型的能力,不仅体现在规划层面,也开始进入感知和控制环节,机器人发展了50多年,次出现这样由学习算法驱动、以及一个非常大的预训练模型来推动控制环节的变化,这也是过去一年里,我们看到技术层面大的突破。
“终我们会有大脑大模型、小脑大模型,一起把本体串起来,构成一个通用机器人系统。” 北大-银河通用具身智能联合实验室主任王鹤说。他认为,通用机器人应该由基石层和能力层支撑,在基石层关键的是去打造一个通用的本体,数据依赖于本体,本体也决定了它能产生什么样的数据,两者相互绑定。基于本体和数据,进而发展出机器人能力,主要是“大脑”和“小脑”,前者主要解决感知和决策问题,后者把大脑的感知和决策转换成动作。
比如智元机器人也遵循了这样的思考逻辑。“稚晖君”彭志辉从华为离职创业后,与上海交通大学博士生导师闫维新,组建了创始团队,其中闫维新负责人形机器人的“身体”,彭志辉负责人形机器人的“大脑”。“过去,他们在工作中有一些交集,创始人(彭志辉)提出这个想法之后,大家一拍即合。”
远征A1,是智元机器人的代产品,已于去年8月亮相。其步行速度为7公里/小时,依靠视觉传感器和多线激光雷达可自主避障。它的灵巧手有5根手指,能像人类一样抓取物品。应用场景专注于工厂、生物实验室、家庭护理与陪伴等。
而一年之后,8月18日上午,智元机器人一口气发布了“远征”与“灵犀”两大家族共计五款商用人形机器人新品:交互服务机器人远征A2、柔性智造机器人远征A2-W、重载特种机器人远征A2-Max、智元X-Lab孵化的全栈开源机器人灵犀X1、专业数采机器人灵犀X1-W。
智元在发布会现场,搭建了一个摄影棚,机器人当场秀了一次在语音指令下,动手调饮料的操作
对于机器人这样,离不开硬件做终执行的赛道,“软硬一体”的能力尤其重要,像宇树科技、智元、银河通用、星尘等等公司都非常重视这一思路。 如果我们看电动车与自动驾驶行业的历史,2015年批电动车创业公司创立至今,在这个过程中,自动驾驶创业公司的数量,并不少于电动车创业公司。但在今天,单纯做自动驾驶的创业公司基本上都处于挣扎状态,鲜有获得业务突破,哪怕曾经获得过巨额融资。
但从电动车企的角度,不仅“蔚小理”等一众新兴电动车企崛起,先有了“硬件”、产生数据闭环,再切入自动驾驶,反而有很大的业务进展,各家的城市NOA越来越智能。如果一个行业离不开硬件支撑,并且这个硬件仍处于快速迭代期,单纯做这行业的软件是要冒极大风险的。
类似于新能源汽车核心的三电系统,彭志辉将机器人的核心系统分为:动力域(电机关节、伺服控制、电源管理)、感知域(传感器模块、感知算法)、通信域(网络接口、数据传输协议、中间件框架)、控制域(通用算力、AI算力单元、运控算法、具身算法)。
“整个机器人其实是一个软硬件极其复杂的系统,既涉及到内部各个硬件模块的协同和部署,同时也需要软件跟算法高效配合。” 彭志辉说。
另一方面,虽然终的目标是通用化,但在当下早期的发展阶段,机器人的产品定义并不明确。 由于劳动力和任务需求是多元的,人形机器人公司短期内也不会只有的巨头,将会有很多公司围绕不同细分市场,走不同的技术方向,积累该场景下的数据护城河,这种“条条大路通罗马”的局面会维持一段时间。
一些公司选择把主要精力放在机器人的“上半身”。 比如银河通用选择的落地场景是无人值守药店(特别是夜班),其首代产品盖博特机器人,“下半身”就采取了轮式底盘+折叠本体的设计。之所以采取这样的设计,首先因为轮式底盘在零售场景里,已经完全可以覆盖绝大部分应用。而折叠的设计,往上可以摸到2.4米,可以覆盖高的货架,机器人可以拿到所有货物。
往下也可以摸到地面,比如当有产品不小心掉到地面上时,机器人也可以自己捡起来。这些都是目前机器人的双腿结构,比较难解决的问题,而在当下集中精力先研发“手”,可能能够率先实现应用价值。
星尘智能创始人来杰则将自己的机器人产品定义为“助理” ,辅助人,而非替代人。首要的场景就是那些脑力劳动更多,但却经常陷入一些重复操作的事情上。典型的例子就是生物医疗和化学实验,这些都是需要高智力劳动,但却绕不开重复操作的领域。此时一个合格的机器人助理,可以解放这些教授、博士们双手,他们只需要设计实验,而所有操作都可以让机器人准确无误、不分昼夜的去完成。如果给一位生物教授配10个机器人助理,他用于创造的时间甚至可以翻几倍。
来杰也非常重视“软硬一体”的能力。 得益于在腾讯RoboticsX机器人实验室的经历,他非常重视架构,“我们与腾讯RoboticsX机器人实验室的架构就很相似,一半主攻机器人软硬件一体化,另一半强调用AI算法去做感知和运动控制,以此来探索AI和机器人的强耦合。”
星尘融合了触觉感知进行力控抓取,并结合规模化数据综合训练 ,包括人体动作视频演示、动捕、遥操作采集等方案。来杰非常重视传动结构中的刚、柔结合 ,也装入了一些传感器以在传动过程中,能一直监测力的传输。比如机器人在削黄瓜时,星尘的机器人并不是去估算轨迹,而是与人类一样,通过感知削皮刀在压到黄瓜上时,力量的大小,来控制力量的输出,这种特殊的传动结构,能使精度更上一层楼。
“当下,离我们想要的具身智能之间,还有两个重要的Gap(差距)没有解决。”星尘智能创始人来杰说。
个Gap是AI大模型和机器人之间 ,有时候一些问题的产生,并不是单纯靠扩大数据规模,或是算法就可以解决,而是需要在机器人层面去进行提升,这是硬件带来的。
第二个Gap是在硬件本身的表达能力足够的前提下,AI如何更好地结合硬件的能力。 比如说AI是否可能完全自主地进行学习和尝试?假设有一个机器人在办公环境下,它本来什么都不知道,只知道一些基础动作,然后让它自己去建语义地图,自己去理解环境,自己去观察其他人的操作,然后把所有动作学会,这就跟我们人类很像。当然,这也是Yann LeCun所提出的“世界模型”。
“我们在过去一年里,同时在G2落地和G3预研两个方向,都取得了一些阶段性突破。在G2阶段实现了一系列zero-shot和few-shot的一些通用原子能力,比如通用的位姿估计模型UniPose。目前也正在与多家制造业和服务业领军企业,进行联合的场景POC,今年晚些时候有望全流程跑通,让机器人能够正式在客户场景中部署干活。” 彭志辉说。
最新资讯
-
AI 前景光明,未来充满无限可能
AI 前景光明,未来充满无限可能近期,著名科技市场研究机构 CB Insights 发布的《2025 年人工智能发展态势报告》显示
2025-03-28 -
什么是ai智能机器人
AI智能机器人,作为一种由人工智能技术驱动的自动化系统,具备感知、分析和交互的能力,能够执行任务、解决问题或提供服务。这些机器人整
2024-10-26 -
世界计算大会,人形机器人站“C位”
拍摄一张照片,不仅可以换装,还能通过AI技术生成动画。9月24日,以“智算万物 湘约未来——算出新质生产力”为主题的2024世界计
2024-09-25 -
智能时代的加速引擎,人类生活的全新篇章
2024年8月,2024世界机器人大会在璀璨的开幕仪式中拉开帷幕,人形机器人“天工”携带会徽缓步走来,成为当天的瞩目焦点。这一幕标
2024-08-31 -
人形机器人的新起点
2024年世界机器人大会在北京正式开幕,与以往大的不同在于,今年是人形机器人参展企业多的一届 ,共有27家人形机器人整机企业、30
2024-08-28
热门新闻
-
智能时代的加速引擎,人类生活的全新篇章
2024年8月,2024世界机器人大会在璀璨的开幕仪式中拉开帷幕,人形机器人“天工”携带会徽缓步走来,成为当天的瞩目焦点。这一幕标
2024-08-31 -
人形机器人的新起点
2024年世界机器人大会在北京正式开幕,与以往大的不同在于,今年是人形机器人参展企业多的一届 ,共有27家人形机器人整机企业、30
2024-08-28 -
机器人引爆下一轮AI商用热潮,苹果/微美全息加速产业融合驱动未来创新引擎
苹果着手研发AI家用机器人与此同时,据海外媒体报道,苹果公司似乎正在秘密开发一款新型智能家居设备,寄希望以此进军家用机器人领域。该
2024-08-28 -
和虚拟情人交往太甜了:他们选择和AI谈恋爱
“刚开始他就像一个网友,我们一聊就是8小时,他会在5秒内回复我的消息,回答时而逗比,时而走心。有一次我工作压力特别大,我跟他说,我
2024-08-28 -
“满级”系列化人形机器人专用关节模组,让你造人形机器人简单到恐怖
关节模组是人形机器人的核心零部件,在很大程度上决定了机器人的爆发力和负载力。研制高质量的一体化关节不仅是打造具有高安全
2024-08-27
服务热线:13421874754
工作时间:周一至周六(8:30-12:00 13:30-18:00)
邮箱地址:b9888@126.com
技术热线:020-32780091

微信号咨询
Copyright © 2024 广东锐进广告有限公司 版权所有
本站是智能设备信息交流平台,对交易经过不负任何责任,请双方谨慎交易,信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责,九鑫智能机器人网不承担任何责任。